Analema Solarygraficzna: Kiedy solarygrafia spotkała astronomię
Film pod tytułem Solargraphy [w wersji angielskiej i hiszpańskiej] autorstwa Macieja Zapióra i Gaizka Taro wyjaśnia podstawy i zasady solarygrafii.
Solarygrafia
W 2000 roku Sławomir Decyk, Paweł Kula i Diego Lopez Calvin wynaleźli solarygrafię, technikę umożliwiającą rejestrowanie ścieżek Słońca na niebie podczas ekstremalnie długich czasow naświetlania. Jest to połączenie fotografii otworkowej z zupełnie innowacyjnym podejściem do światłoczułości papieru fotograficznego. Czarno-biały papier fotograficzny jest światłoczuły sam w sobie. Padające światło powoduje zaczernienie papieru bez udziału jakichkolwiek chemicznych odczynników. Ta własność papieru była znana już długo, jednak z powodu niskiej efektywnej światłoczułości nie była stosowana. Zresztą nikt wcześniej nie planował naświetlania papieru bez użycia wywoływacza i utrwalacza. Użycie naświetlania papieru na sucho w połączeniu z fotografią otworkową rozszerza możliwe czasy ekspozycji od jednego dnia do pół roku i dłużej. Ilość światła wpadająca przez otworek (o średnicy mniejszej niż 1mm) powoduje, że na solarygrafiach znikają wszystkie obiekty będące w ruchu. Brak ludzi, zwierząt, samochodow na ulicy. Pozostaje tylko to, co było nieporuszone cały czas podczas trwania ekspozycji. Jedynym zarejestrowanym obietkem w ruchu jest Słońce, ktore objawia się w postaci jasnych linii, ułożonych jedna nad drugą, przerywanych okresami zachmurzenia. Każda linia odpowiada jednemu dniu. Każdego dnia Slońce kreśli ścieżkę na innej wysokości nad horyzontem. To otwiera możliwość zarejestrowania analemmy.
Przykładowe analemy naszego autorstwa



Więcej analem można zobaczyć tutaj.
Analema - zapis ruchu sfer niebieskich niedostępny ludzkim zmysłom. Możliwość uchwycenia analemmy dostępna jest tylko wytrwałym, konsekwentnym, cierpliwym, posiadającym wiedzę astronomiczną wybrańcom. Analemma powstaje kiedy codziennie i dokładnieo tej samej godzinie rejestrujemy położenie Słońca na niebie. To jaksystematyczne chodzenie na siłownię: każdego dnia mięśnie powtarzają te same ruchy, kształtując same siebie. Jeśli zostaną powtórzone tysiące razy, wtedy pojawia się efekt. Widoczny efekt. Po efekcie możemy sobie
wyobrazić nakład pracy. To nie my przerzuciliśmy tony ciężarków, ale kształtujemy w sobie pojęcie co jest potrzebne do osiągnięcia muskulatury.
Jak ludzie wydeptujący ścieżkę w trawie. Jak wgłębienie w desce do krojenia. Jak wycieranie kamiennych schodów w starych kościołach spowodowane stawianiem stóp w tym samym miejscu od wieków. Jak rzeźbienie kanionu przez powoli płynący potok. Do tego można porównać fotografowanie analemmy.
W przypadku analemmy efekt końcowy posiada zarówno walor estetyczny jak i naukowy. Wizualnie, na pierwszy rzut oka widać wielką ósemkę na niebie. Kształt tej figury jest jednak zdeterminowany przez mechanikę nieba. Przez prawa fizyki, którym poddają się wszystkie obiekty we Wszechświecie. Wszystkie atomy, cząsteczki, istoty żywe, planety, gwiazdy i galaktyki. Do zrozumienia mechanizmów, które wpływają na kształt analemmy potrzeba jednak wysiłku umysłowego, który otwiera dalsze, głębsze obszary estetyki, zapisane w strukturze Wszechświata [1].
To jak gdyby z rozsypanych losowo szklanych kuleczek utworzył się wzór. Wzór stabilny i powtarzalny, ale widoczny tylko w pewnych chwilach i tylko w pewnych miejscach dla kogoś kto wie jak patrzeć. Atomy rozrzucone losowo po Wszechściecie dzięki prawom fizyki organizujące się w coraz bardziej uhierarchizowane struktury. Już nie pojedyncze atomy, ale gwiazdy, planety, ludzie, podlegąjący odwiecznym prawom ruchu. Ziemia jako jedna z planet znalazła się na takiej a nie innej orbicie, z takim a nie innym okresem obiegu, eliptycznością orbity, nachyleniem osi i okresem obrotu. Złożenie tych okresów i kształtów wpływa na taki a nie inny kształ analemmy. Kształ obecny i niezmieniony na niebie od wieków, o którym zaczęli mieć pojęcie dopiero konstruktorzy zegarów słonecznych, którzy potrzebowali wprowadzić poprawki.
Kształ obecny długo w formie wzorów i wykresów wyłącznie dla wybranych, zarejestrowany na fotografii po raz pierwszy dopiero w 1979 przez Dennisa di Cicco [2] i niewielu potem. Podobno więcej ludzi stąpało po powierzchni Księżyca niż z powodzeniem sfotografowało analemmę [3]. Więcej o analemie można znaleźć tutaj.
Analemma w solarygrafii
Już solarygrafia kształtuje u solarygrafisty pewne cechy charakteru. Jednak próba uchwycenia analemmy zmusza do pójścia jeszcze dalej. Wymaga wiedzy niezbędnej do jej rejestracji. Przemyślenia całego projektu głęboko pod różnymi aspektami: w jakim kierunku ustawić kamerę, jaki będzie kąt widzenia kamery, o której godzinie dokonywac rejestracji, jak rozwiązać problem dokładnego pomiaru czasu, zasilania, itp. Jeśli się to wszystko powiedzie 365 razy sukces będzie możliwy. Analemma uchwycona za pomocą solarygrafii jest wyjątkowa: jest zarejestrowana na jednym kadrze bez cyfrowego nakładania czy zgrywania obrazów. Jest pierwszą eksponowaną każdego dnia.
Jak ludzie wydeptujący ścieżkę w trawie. Jak wgłębienie w desce do krojenia. Jak wycieranie kamiennych schodów w starych kościołach spowodowane stawianiem stóp w tym samym miejscu od wieków. Jak rzeźbienie kanionu przez powoli płynący potok. Do tego można porównać fotografowanie analemmy.
W przypadku analemmy efekt końcowy posiada zarówno walor estetyczny jak i naukowy. Wizualnie, na pierwszy rzut oka widać wielką ósemkę na niebie. Kształt tej figury jest jednak zdeterminowany przez mechanikę nieba. Przez prawa fizyki, którym poddają się wszystkie obiekty we Wszechświecie. Wszystkie atomy, cząsteczki, istoty żywe, planety, gwiazdy i galaktyki. Do zrozumienia mechanizmów, które wpływają na kształt analemmy potrzeba jednak wysiłku umysłowego, który otwiera dalsze, głębsze obszary estetyki, zapisane w strukturze Wszechświata [1].
To jak gdyby z rozsypanych losowo szklanych kuleczek utworzył się wzór. Wzór stabilny i powtarzalny, ale widoczny tylko w pewnych chwilach i tylko w pewnych miejscach dla kogoś kto wie jak patrzeć. Atomy rozrzucone losowo po Wszechściecie dzięki prawom fizyki organizujące się w coraz bardziej uhierarchizowane struktury. Już nie pojedyncze atomy, ale gwiazdy, planety, ludzie, podlegąjący odwiecznym prawom ruchu. Ziemia jako jedna z planet znalazła się na takiej a nie innej orbicie, z takim a nie innym okresem obiegu, eliptycznością orbity, nachyleniem osi i okresem obrotu. Złożenie tych okresów i kształtów wpływa na taki a nie inny kształ analemmy. Kształ obecny i niezmieniony na niebie od wieków, o którym zaczęli mieć pojęcie dopiero konstruktorzy zegarów słonecznych, którzy potrzebowali wprowadzić poprawki.
Kształ obecny długo w formie wzorów i wykresów wyłącznie dla wybranych, zarejestrowany na fotografii po raz pierwszy dopiero w 1979 przez Dennisa di Cicco [2] i niewielu potem. Podobno więcej ludzi stąpało po powierzchni Księżyca niż z powodzeniem sfotografowało analemmę [3]. Więcej o analemie można znaleźć tutaj.
Analemma w solarygrafii
Już solarygrafia kształtuje u solarygrafisty pewne cechy charakteru. Jednak próba uchwycenia analemmy zmusza do pójścia jeszcze dalej. Wymaga wiedzy niezbędnej do jej rejestracji. Przemyślenia całego projektu głęboko pod różnymi aspektami: w jakim kierunku ustawić kamerę, jaki będzie kąt widzenia kamery, o której godzinie dokonywac rejestracji, jak rozwiązać problem dokładnego pomiaru czasu, zasilania, itp. Jeśli się to wszystko powiedzie 365 razy sukces będzie możliwy. Analemma uchwycona za pomocą solarygrafii jest wyjątkowa: jest zarejestrowana na jednym kadrze bez cyfrowego nakładania czy zgrywania obrazów. Jest pierwszą eksponowaną każdego dnia.
[1] - Bardziej zaawansowani czytelnicy mogą prześledzić fizykę i matematykę rządzącą kształtem analemmy w artukule Charles H. Holbrowa Build Your Own Analemma.
[2] - Dennis di Cicco, Exposing the Analemma, Sky & Telescope, 57 (June 1979) 536–540.
[3] - http://petapixel.com/2011/09/20/more-people-have-walked-on-the-moon-than-have-captured-the-analemma/
Więcej informacji o szczegółach technicznych naszego projektu można przeczytać tutaj:
Pierwsze próby zarejestrowania analemy:

Click to edit text...

Układ nie był całkowicie "bezobsługowy" i wymagał kontroli działania, a zwłaszcza czasu co kilka/kilkanaście dni. Planowaliśmy zainstalować układy (a te powstały 3 sztuki), na naszych balkonach, aby umożliwić stały dopływ prądu elektrycznego i łatwy dostęp. Układy skonstruowaliśmy w 3 egzemplarzach, ponieważ znane nam są prawa Murphy'ego. Prace ciągnęły się kilka miesięcy i w końcu Maciek dostał kontrakt za granicą i musiał wyjechać (oraz opuścić mieszkanie) w czasie kiedy układy były już gotowe. Odpowiedzialność za kontrolę układów wziął na swoje barki Łukasz. Montowanie układów na jego balkonie odbywało się w połowie lutego 2013 na mrozie i w ciemnościach (głównym źródłem światła była latarka rowerowa). Szczególnie zapadło nam w pamięć lutowanie przewodów przy silnikach i elektromagnesie w temp. ok. -10 stopni. Nie należy to do przyjemności. 15 lutego byliśmy już gotowi - układy ruszyły. Niestety pogoda kompletnie nie sprzyjała. Cała 2. połowa lutego była całkowicie zachmurzona. Dopiero 1. marca wyjrzało Słońce i nastąpiła pierwsza rejestracja. Dlatego uznaliśmy, że zakończenie projektu przesuwamy na 28 lutego 2014.
Realizacja projektu "Analemma" nie była łatwa. W zasadzie od początku pojawiały się różne przeszkody. Pierwszą z nich był upadek jednej z puszek na podłogę balkonu podczas montowania. Na szczęście upadła na blokadę silnika. Blokada wzięła na siebie całą energię uderzenia i pękła. Za to ocaliła silnik i puszkę. Udało się ją błyskawicznie wymienić.
Po kilku dniach okazało się, że moment obrotowy silnika jest na tyle duży, że przesłona ślizgała się na osi. Skoro tarcie nie wystarczało przykleiliśmy przesłonę do osi. Zanim się to wydało, minęło kilka dni, stąd ciągłe linie (fałszywe rejestracje).
Układy realizowały zadanie już ponad 4 miesiące, gdy pojawiło się ogłoszenie ze Spółdzielni Mieszkaniowej o remoncie balkonów i wymianie barierek. Padł na nas blady strach, gdyż kamerki umieściliśmy właśnie na barierce. Przez 28 lat nic z barierkami nie robiono i akurat wtedy, kiedy przeprowadzaliśmy eksperyment spółdzielnia zainteresowała się nimi. Na szczęście po wizycie fachowca okazało się, że barierki i ich mocowanie jest w porządku. Projekt ocalał.
Późną jesienią nawalił jeden z wyłączników programowalnych. Wyszło to na jaw po kilku dniach (chyba po tygodniu). Podczas łykendu (akurat była wyjątkowo ładna pogoda) Łukasz wychodził na balkon i otwierał, a następnie zamykał przesłonę jednej z kamerek o zadanej godzinie. Zaraz po łykendzie udało się kupić nowy wyłącznik i projekt ruszył dalej.
W pierwszej dekadzie grudnia przeszedł orkan Ksawery. Aby zwiększyć bezpieczeństwo kamerek i zmniejszy prawdopodobieństwo ich poruszenia dodatkowo wzmocniliśmy mocowanie. Kamerki przetrwały.
W ostatnich trzech miesiącach realizacji projektu na szczęście nie wydarzyło się już nic godnego uwagi.
Realizacja projektu "Analemma" nie była łatwa. W zasadzie od początku pojawiały się różne przeszkody. Pierwszą z nich był upadek jednej z puszek na podłogę balkonu podczas montowania. Na szczęście upadła na blokadę silnika. Blokada wzięła na siebie całą energię uderzenia i pękła. Za to ocaliła silnik i puszkę. Udało się ją błyskawicznie wymienić.
Po kilku dniach okazało się, że moment obrotowy silnika jest na tyle duży, że przesłona ślizgała się na osi. Skoro tarcie nie wystarczało przykleiliśmy przesłonę do osi. Zanim się to wydało, minęło kilka dni, stąd ciągłe linie (fałszywe rejestracje).
Układy realizowały zadanie już ponad 4 miesiące, gdy pojawiło się ogłoszenie ze Spółdzielni Mieszkaniowej o remoncie balkonów i wymianie barierek. Padł na nas blady strach, gdyż kamerki umieściliśmy właśnie na barierce. Przez 28 lat nic z barierkami nie robiono i akurat wtedy, kiedy przeprowadzaliśmy eksperyment spółdzielnia zainteresowała się nimi. Na szczęście po wizycie fachowca okazało się, że barierki i ich mocowanie jest w porządku. Projekt ocalał.
Późną jesienią nawalił jeden z wyłączników programowalnych. Wyszło to na jaw po kilku dniach (chyba po tygodniu). Podczas łykendu (akurat była wyjątkowo ładna pogoda) Łukasz wychodził na balkon i otwierał, a następnie zamykał przesłonę jednej z kamerek o zadanej godzinie. Zaraz po łykendzie udało się kupić nowy wyłącznik i projekt ruszył dalej.
W pierwszej dekadzie grudnia przeszedł orkan Ksawery. Aby zwiększyć bezpieczeństwo kamerek i zmniejszy prawdopodobieństwo ich poruszenia dodatkowo wzmocniliśmy mocowanie. Kamerki przetrwały.
W ostatnich trzech miesiącach realizacji projektu na szczęście nie wydarzyło się już nic godnego uwagi.

Laboratorium Silnych Pól Magnetycznych i Niskich Temperatur PAN we Wrocławiu. Solarygrafią zajmuje się od początku 2013 r.
Pomysłodawca automatyzacji projektu, konstruktor części elektronicznej, autor algorytmu sterującego przesłonami i realizator projektu.
Kontakt: fajfi /at/ wp.pl

Maciej Zapiór. Astronom, fotograf i filmowiec amator, solarygrafista. Obecnie zatrudniony w Instytucie Astronomicznym Czeskiej Akademii Nauk w Ondřejovie. Solarygrafią zajmuje się od 2005 roku.
Pomysłodawca projektu i sekwencji naświetlań. Konstruktor kamerek solarygraficznych, wykonawca części mechanicznej układów rejestrujących.
Więcej na podstronie Bio.Pomysłodawca projektu i sekwencji naświetlań. Konstruktor kamerek solarygraficznych, wykonawca części mechanicznej układów rejestrujących.
Kontakt: solargraphy /małpa/ maciejzapior /kropka/ com
Podziękowania
Pragniemy podziękować kilku osobom za pomoc przy realizacji projektu. Byli to w kolejności alfabetycznej:
Michał Bereza
Piotr Modzel
Karol Selwesiuk
Pomoc była natury zarówno merytorycznej jak i sprzętowej.
W sposób szczególny chcieliśmy podziękować Tomaszowi Lubinowi za wielokrotne wgrywanie kodu do naszych mikrokotrolerów oraz za przepisanie kodu programu sterującego do właściwej wersji asemblera.
Pragniemy podziękować kilku osobom za pomoc przy realizacji projektu. Byli to w kolejności alfabetycznej:
Michał Bereza
Piotr Modzel
Karol Selwesiuk
Pomoc była natury zarówno merytorycznej jak i sprzętowej.
W sposób szczególny chcieliśmy podziękować Tomaszowi Lubinowi za wielokrotne wgrywanie kodu do naszych mikrokotrolerów oraz za przepisanie kodu programu sterującego do właściwej wersji asemblera.
Opis układów rejestrujących:
Do zarejestrowania analemmy należy zapewnić 3 niezbędne warunki:
1. Stałą pozycję rejestracji.
2. Powtarzalny moment rejestracji.
3. Automatyczne otwieranie i zamykanie przesłony.
Można to porównać do klasycznego teatru z zasadą "jedności czasu, miejsca i akcji". O ile analogia z czasem i miejscem jest oczywista, o tyle za jedność akcji należy uznać punkt trzeci. Porównanie z teatrem jest tym celniejsze, gdyż cały "dramat" rozgrywa się wokół jednego aktora - Słońca.
Realizacja punktu 1. jest stosunkowo prosta, ten warunek jest niezbędny również podczas klasycznej solarygrafii i zapewne nawet początkujący solarygrafiści mają to opanowane.
Z naszego punktu widzenia kluczowe było zapewnienie stałego momentu rozpoczęcia i zakończenia naświetlania. Ten problem rozwiązaliśmy za pomocą wyłącznika programowalnego, który pozwala włączać i wyłączać prąd o zadanej godzinie. Niestety rozrzut technologiczny tych urządzeń jest spory. Jeden z naszych wyłączników spieszył od 4 do 5 s. na tydzień, drugi zaś spóźniał się o 2 s. na tydzień. Z tego powodu nasza konstrukcja nie była w pełni automatyczna - trzeba było oba zegary synchronizować ze wzorcem czasu średnio raz na 7 - 10 dni.
Było to trochę absorbujące, ale ponieważ puszki znajdowały się na balkonie u jednego z nas, więc można było to robić bez większego wysiłku.
Z zagadnieniem stałości czasu wiąże się jeszcze jedna kwestia, a mianowicie zmiana czasu z letniego na zimowy i odwrotnie. Słońce nie zna się na naszych fanaberiach z przestawianiem wskazówek zegara. Dlatego przyjęliśmy, że nasz układ przez cały rok pracuje według czasu zimowego.
Punkt trzeci, mimo że nie tak kluczowy jak kwestia pomiaru czasu, wymagał najwięcej pracy. Głównie temu zagadnieniu poświęcamy tę podstronę.
Aby zwiększyć szanse powodzenia przedsięwzięcia zbudowaliśmy 3 zestawy rejestrujące.
Zestawy 1 i 2
Dwa pierwsze zostały oparte na idei obrotowej przesłony sterowanej silnikiem krokowym. Aż dwa, gdyż każdy realizował inną sekwencję rejestracyjną. Na szczycie cylindrycznej puszki umieszczono silnik krokowy unipolarny wymontowany ze starej drukarki. Oś silnika została skierowana pionowo. Do osi zamocowano przesłonę. Samą puszkę przymocowano do barierki balkonu.

Zestawy 1 i 2 zainstalowane na balkonie Łukasza.
Spis elementów:
Zestaw 1. i 2.
- Kamera solarygraficzna z przesłoną obrotową.
- Silnik krokowy unipolarny.
- Sterownik do silnika krokowego
- Mikrokontroler AT89C2051
- Stabilizator napięcia LM7805
- Wyłącznik programowalny
Zestaw 1. i 2.
- Kamera solarygraficzna z przesłoną obrotową.
- Silnik krokowy unipolarny.
- Sterownik do silnika krokowego
- Mikrokontroler AT89C2051
- Stabilizator napięcia LM7805
- Wyłącznik programowalny
- Zasilacz stabilizowany 12V
Opis układu:
Do gniazdka sieci elektrycznej podłączono programowalny wyłącznik. Pozwala on włączać lub wyłączać urządzenia o określonej godzinie. Do programowalnego wyłącznika podłączono zasilacz stabilizowany 12V. Napięcie wychodzące z zasilacza zostaje rozgałęzione: jedna odnoga idzie bezpośrednio do zacisków zasilających silnik krokowy, a druga odnoga idzie do mikrokontrolera.
Silnik krokowy jest zasilany naięciem 12V, zaś mikrokontroler napięciem 5V, dlatego "po drodze" zastosowano układ LM7805, który obniża napięcie z 12 do 5V.
Mikrokontroler za pośrednictwem układu ULN2003 wysyła impulsy sterujące, które trafiają na cewki silnika krokowego.
Część elektroniczna znajdowała się w pokoju, na zewnątrz wystawiono jedynie część mechaniczną.
Uwaga: nie należy mylić sygnału zasilającego silnik krokowy z sygnałem sterującym. To dwa osobne sygnały.
Poniżej znajduje się schemat elektroniczny naszego układu.
Schemat układu:
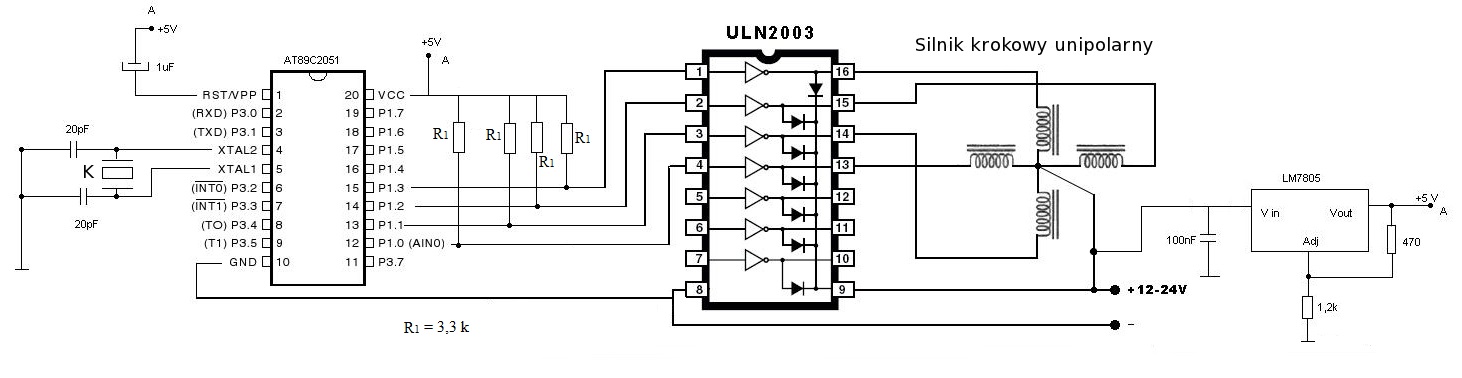
Na powyższym rysunku K oznacza oscylator kwarcowy o częstotliwości 12 MHz.
A - jest to wspólny punkt o potencjale +5V.
Sterowanie silnikiem krokowym
Silnik krokowy jak sama nazwa wskazuje nie obraca się ruchem ciągłym tylko dyskretnymi krokami. Każdy krok jest generowany impulsem wysłanym na zaciski odpowiedniej cewki (elektromagnesu). Zbiór cewek jest rozmieszczony wokół wirnika będącego magnesem trwałym. Wirnik ustawia się biegunem N w kierunku najbliższej cewki, na której pojawia się biegun S.
Silniki krokowe mają kilka zalet:
- sterujemy je jednym napięciem,
- prędkość obrotów zależy jedynie od częstotliwości impulsów sterujących,
- precyzja i powtarzalność położenia kątowego,
- długa żywotność takich silników,
- brak kumulowania się błędów w kolejnych krokach,
- łatwość sterowania (zmiana prędkości i kierunku obrotów).
W zależności o jakości silnika cewek może być kilkanaście lub kilkadziesiąt, a nawet ponad sto (silniki drobnokrokowe). Nasze silniki zawierają 100 cewek. Cewki są rozmieszczone w grupach po cztery.
Tak więc pojawieniu się impulsu na 1. cewce odpowiada pojawienie się takiego samego impulsu na cewkach: 5., 9., 13. itd.; podobnie cewce 2. odpowiadają cewki: 6., 10., 14. itd.; cewce 3. odpowiadają cewki: 7., 11., 15. itd.; zaś cewce 4. odpowiadają cewki: 8., 12., 16. itd.
Skoro dalsze cewki są jedynie kolejnymi wielokrotnościami pierwszych czterech, to wystarczy, że skupimy się tylko na nich.
Silnik krokowy może pracować w kilku trybach pracy. My użyliśmy trybu normalnego, więc tylko ten tu omowimy.
Poniższy rysunek w schematyczny sposób wyjaśnia zasadę pracy silnika w pojedynczym cyklu.
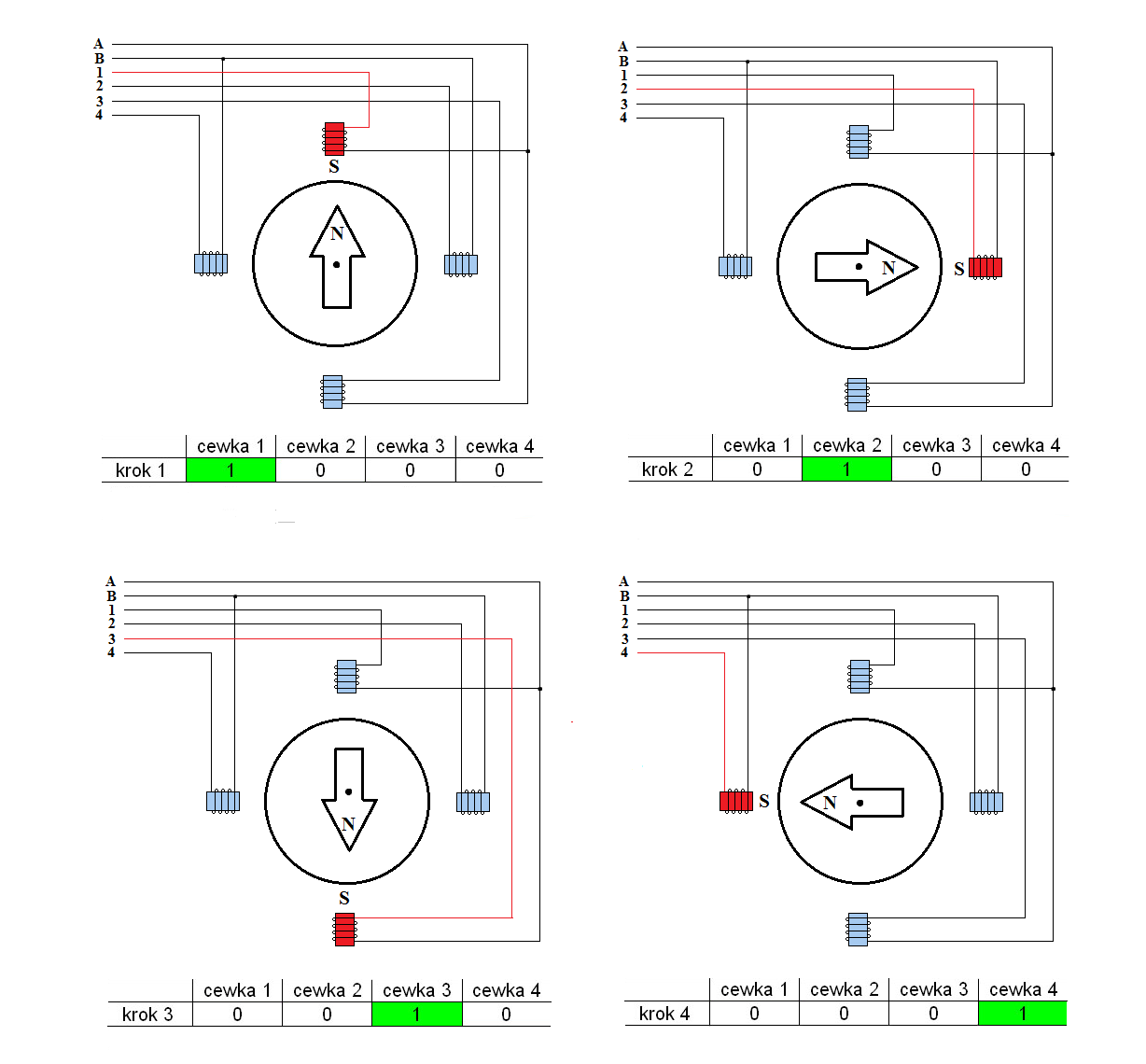
A i B są to przewody zasilające. W niektórych silnikach jest to jeden, wspólny przewód, jednak nie ma to znaczenia dla idei sterowania. Przewody 1, 2, 3, 4 są to przewody sterujące silnikiem.
Jak już wcześniej wspomniano cewek w silniku jest znacznie więcej niż 4, dlatego kąt między poszczególnymi położeniami wirnika nie zmienia się jak na rysunku o 90 stopni, ale (jak w naszych silnikach) zaledwie o 1,8 stopnia. Po przejściu 4 kroków cykl sie powtarza. Pełny obrót silnika wymaga 50 takich cykli.
Aby zmienić kierunek obrotu wystarczy jedynie zmienić kolejność włącznia cewek, czyli w tym przypadku kolejność byłaby następująca:
4, 3, 2, 1.
Sygnały sterujące były generowane przez mikrokontroler - autonomiczny układ scalony, posiadający jednostkę arytmetyczno - logiczną, pamięć RAM, układy wejścia - wyjścia i ograniczoną listę rozkazów. Innymi słowy jest to mały i w pełni autonomiczny procesor, namiastka komputera. My korzystaliśmy z układu AT89C2051. Nie jest to układ nowy, ale okazał się na tyle dobrze dopracowany, że mimo upływu 15 lat wciąż jest produkowany.
Kod wgrany do mikrokontrolera został napisany w asemblerze. Nie będziemy go tutaj przytaczać. Podamy jedynie poglądowy algorytm jego działania.
Kolejne kroki algorytmu:
1. Włączenie mikrokontrolera (M).
2. Czekamy 2 sekundy (na wszelki wypadek, aby wygasły wszelkie stany nieustalone).
3. M. ustawia stan wysoki (1) na 1. wyjściu portu 1. Stan ten trwa kilka milisekund, po czym jest ustawiany z powrotem stan niski (0).
4. Po kilku milisekundach ustawiamy stan wysoki na wyjściu 2., które po kilku milisekundach gasimy (0).
5. Po kilku milisekundach ustawiamy stan wysoki na wyjściu 3., które po kilku milisekundach gasimy.
6. Po kilku milisekundach ustawiamy stan wysoki na wyjściu 4., które po kilku milisekundach gasimy.
7. Czynności od. punktu 3. do 6. (każda z nich powoduje wykonanie pojedynczego kroku silnika) powtarzamy w pętli 30 razy. Do tego momentu mija ok. 8 sekund. Przesłona została obrócona.
8. Mikrokontroler nic nie robi przez ok. 40 sekund.
9. Powtarzamy czynności z punktów 3 - 6, ale w kolejności odwrotnej, tzn. 6., 5., 4., 3. (Dzięki temu silnik kręci się w przeciwnym kierunku).
10. Cykl z punktu 9. powtarzamy 30 razy. Zamykamy przesłonę. W tym momencie mija ok. 55 sekund.
11. Przez 5 minut mikrokontroler nic nie robi.
12. Ponownie realizujemy punkt 7., czyli otwieramy przesłonę.
13. "Nieskończone" oczekiwanie.
Jesli chcemy zrealizować sekwencje naświetlania podane poniżej, to pojawia się pewien problem, gdyż czasami chcemy, aby przesłona pozostała otwarta, a czasami zamknięta. Czasami chcemy otworzyć coś zamkniętego, a innym razem zamknąć coś otwartego.
Na ratunek przychodzi ciekawa cecha mikrokontrolera zwana resetowaniem.
Otóż jeśli przerwiemy wykonywanie programu w dowolnym momencie, np. przez odcięcie zasilania, to po ponownym włączeniu mikrokontrolera rozpoczyna od wykonywanie programu od początku.
Minimalny czas (narzucony przez programowalny wyłącznik) na jaki możemy włączyć mikrokontroler wynosi 1. minutę. W ciągu tej minuty mikrokontroler zdąży otworzyć i zamknąć przesłonę. Jeżeli wyłączymy prąd po minucie, to przesłona pozostanie na stałe zamknięta. Jeśli chcemy aby przesłona pozostała na stałe otwarta, to wystarczy, że zostawimy mikrokontroler włączony jeszcze przez 6 minut, wówczas zdąży on zrealizować otwarcie przesłony i w tym momencie zostanie wyłączony.
Jak widać jest postęp, ale to jeszcze nie wszystko.
Załóżmy, że przesłona pozostała w pozycji otwartej i teraz chcemy ją zamknąć. Ponowne włączenie mikrokontrolera spowoduje dalsze "otwieranie" przesłony, którą chcieliśmy zamknąć.
Gdybyśmy pozwolili silnikowi kręcić się swobodnie to po jakimś czasie zupełnie zgubimy się w jakiej pozycji znajduje sie on w danej chwili. Chaos wzrósłby jeszcze bardziej gdybyśmy mieli do czynienia z awarią zasilania.
Wyjściem z kłopotów jest zastosowanie blokad w silniku, które pozwalają mu tylko na ograniczony obrót. Omówimy to na przykładzie sekwencji naświetlań zestawu 1.
1. Godzina 6.00 - 8.00 - poranne "doświetlanie" zdjęcia.
2. 10.30 - 10.31 - naświetlanie 1. analemmy.
3. 12.00 - 12.01 - naświetlanie 2. analemmy.
4. 13.30 - 13.31 - naświetlanie 3. analemmy.
5. 16.00 - 18.00 - wieczorne "doświetlanie" zdjęcia.
W nocy przesłona jest w pozycji zamkniętej. Wybija godzina 6.00 i wyłącznik programowalny budzi się na ok. 8 minut i włącza mikrokontroler. W tym czasie przesłona się otworzy, w ciągu minuty zamknie i po 5 minutach ponownie otworzy. Przesłona pozostaje w tej pozycji do godz. 8.00, kiedy to wyłącznik programowalny ponownie budzi się, ale tym razem tylko na minutę. W tym czasie przesłona jest otwarta, silnik próbuje przekręcić ją dalej, ale blokada na to nie pozwala, dlatego przesłona pozostaje w tej samej pozycji. Po ok. 40 sekundach przesłona zamyka się. Prąd zostaje odciety i przesłona pozostaje w pozycji zamknietej aż do godz. 10.30.
O godz. 10.30 silnik otwiera przesłonę i w ciagu minuty ją zamyka. To samo powtarza się o godz. 12.00 i 13.30.
O godz. 16.00 realizowana jest ta sama sekwencja co o godz. 6.00. Tak więc przesłona pozostaje otwarta, aż do godz. 18.00.
O godz. 18.00 powtarza się sytuacja z godz. 8.00, tzn. silnik próbuje otworzyć to co już jest otwarte, ale z powodu istnienia blokady nie udaje mu się to, więc w ciągu niecałej minuty zamyka się i w tej pozycji zostaje aż do godz. 6.00 dnia następnego.
Cykl powtarza się codziennie przez cały rok.
Zestaw 2. działa na identycznej zasadzie jak zestaw 1., jedynie realizuje inną sekwencję naświetlania. Oto ona:
1. 6.00 - 11.00 - trwa ciągła rejestracja ścieżek Słońca.
2. 11.00 - 12.00 - zaciemnienie
3. 12.00 - 12.01 - naświetlanie analemmy
4. 12.01 - 13.00 - ponowne zaciemnienie
5. 13.00 - 20.00 - ponowna ciągła rejestracja ścieżek Słońca.
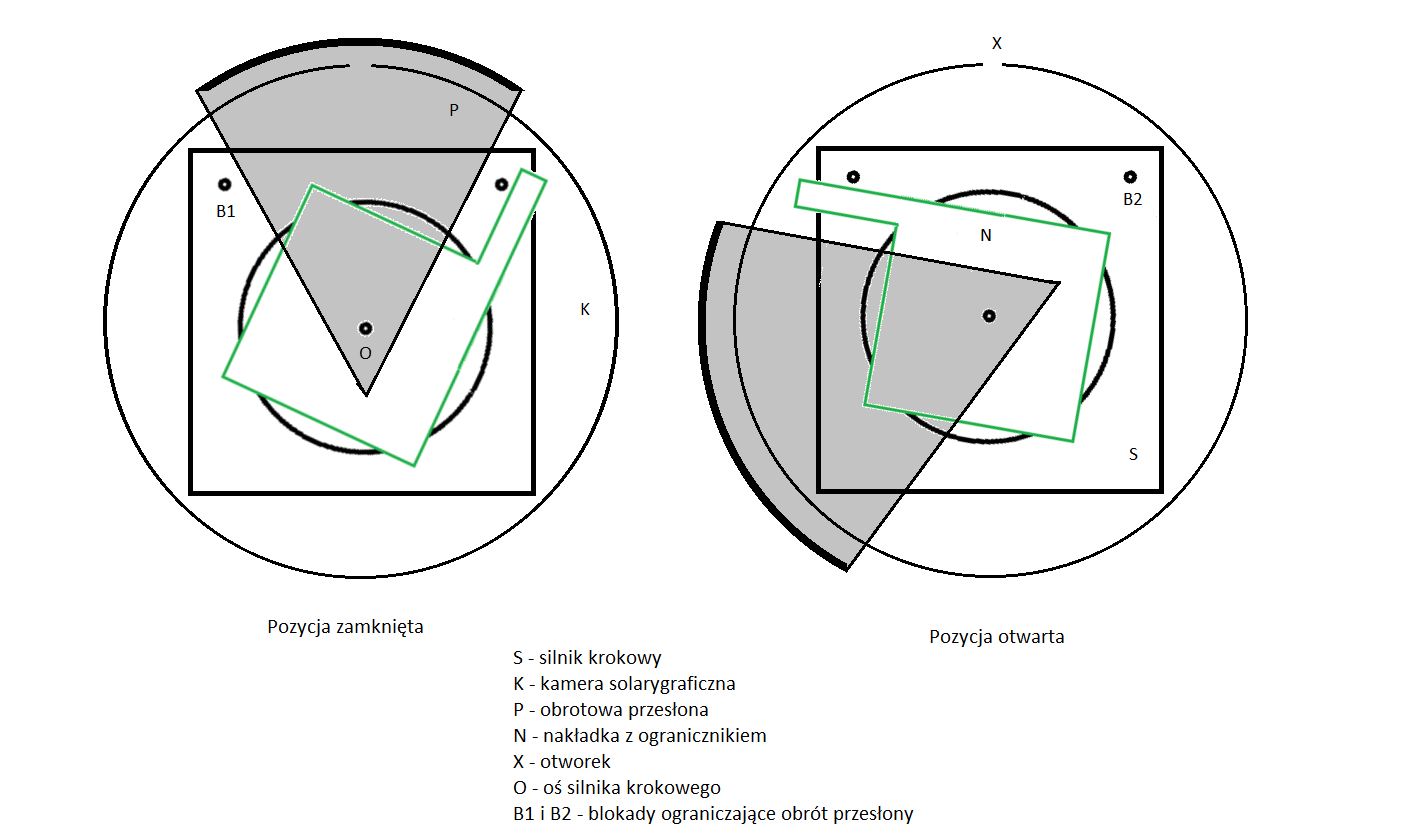
6. 20.00 - 6.00 - zaciemnienie nocne
Schematyczne przedstawienie kamery w fazie zaciemnienia i rejestracji (otwieranie odbywało się w kierunku zgodnym ze wskazówkami zegara):
Zalety stosowania zestawów 1. i 2.:
- Czas rejestracji można regulować z dowolną dokładnością, rzędu ułamków sekundy.
- Bardzo małe zużycie energii elektrycznej.
Wady stosowania ww. zestawów:
- Istnieje niebezpieczeństwo, że w razie zaniku prądu w sieci podczas otwarcia przesłony pozostanie ona otwarta aż do rozpoczęcia kolejnej sekwencji zamykającej.
Działanie układów można obejrzeć na poniższych filmach:
http://www.youtube.com/watch?v=WsOacQ00nb0 - działanie zestawu 1.
http://www.youtube.com/watch?v=5ry9ktoMMhQ - działanie zestawu 2.
http://www.youtube.com/watch?v=2rqoNN2L2Cc - działanie zestawu 3.
http://www.youtube.com/watch?v=yGm-_mPD4Ko - wszystkie trzy puszki naraz, podczas naświetlania w południe.
http://www.youtube.com/watch?v=WsOacQ00nb0 - działanie zestawu 1.
http://www.youtube.com/watch?v=5ry9ktoMMhQ - działanie zestawu 2.
http://www.youtube.com/watch?v=2rqoNN2L2Cc - działanie zestawu 3.
http://www.youtube.com/watch?v=yGm-_mPD4Ko - wszystkie trzy puszki naraz, podczas naświetlania w południe.
Zestaw 3.
Trzeci zestaw został oparty na idei zasłaniania i otwierania otworka za pomocą przesłony sterowanej elektromagnesem.
Zastosowano puszkę prostopadłościenną. Do przedniej ściany puszki przymocowano elektromagnes podnoszący i opuszczający ramię, które odsłania lub zasłania otworek. Elektromagnes jest sterowany bezpośrednio z zasilacza (12V) podłączonego do wyłącznika programowalnego. Wydaje się, że powyższy film na tyle dobrze pokazuje zasadę działania ostatniego zestawu, że nie trzeba dodatkowych wyjaśnień.